I ricercatori dell’Istituto Italiano di Tecnologia hanno raggiunto un traguardo significativo nel campo della robotica dimostrando per la prima volta al mondo il volo di un robot umanoide munito di jet di propulsione. Il robot iRonCub3 è unico nel suo genere, ha un corpo dalle sembianze umanoidi, dotato di due braccia e due gambe, ed è munito di una propulsione a razzi, oltre ad essere specificatamente progettato per operare in ambienti reali.
Durante gli esperimenti di volo, il robot è stato in grado di sollevarsi dal suolo di circa 50 centimetri mantenendo la stabilità. Il risultato è stato possibile grazie a studi avanzati di termodinamica e aerodinamica e allo sviluppo di software di controllo basati sull’intelligenza artificiale. L’obiettivo futuro è applicare questo tipo di tecnologia a supporto dell’essere umano per rispondere a situazioni di emergenza o per esplorazioni in ambienti estremi e missioni di ricerca e salvataggio.
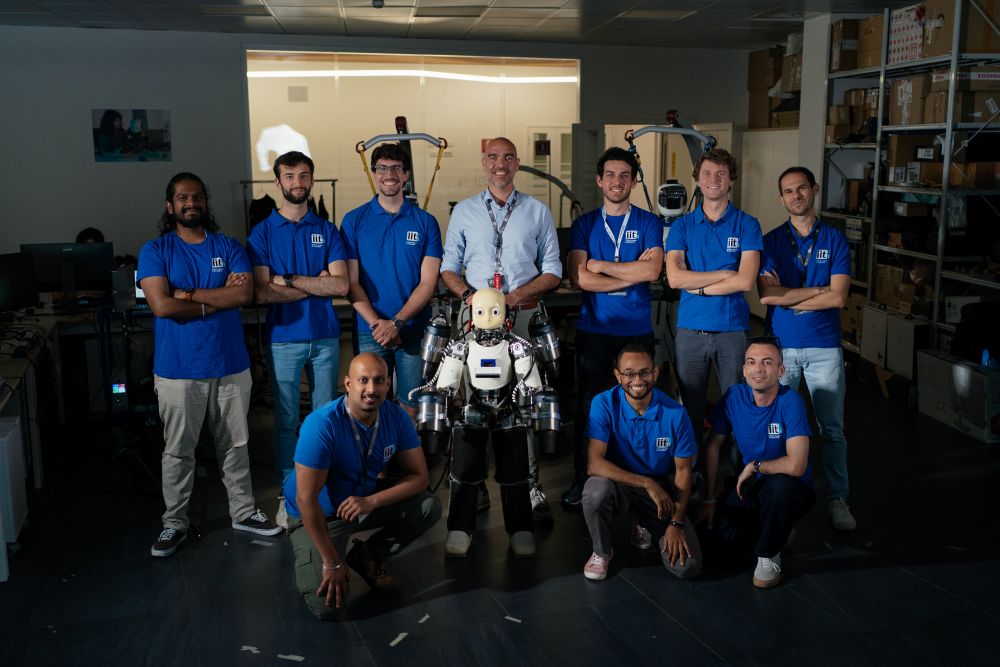
La dimostrazione del volo di iRonCub3 rappresenta l’ultimo successo ottenuto dal laboratorio di Artificial and Mechanical Intelligence (AMI) dell’Iit di Genova, guidato da Daniele Pucci. Il progetto ha richiesto circa due anni di lavoro, comprensivi dei test di volo, e ha riguardato sia lo studio dell’aerodinamica del corpo del robot, molto complessa trattandosi di un corpo umanoide non eletto per il volo, sia lo sviluppo di software di controllo in grado di gestire le diverse parti di cui è costituito il robot.
Gli studi di aerodinamica e controllo sono stati descritti in un articolo pubblicato oggi su Nature Communications Engineering, una rivista del portfolio Nature. La ricerca è stata condotta dai ricercatori di robotica dell’Iit di Genova, in collaborazione con il gruppo di Alex Zanotti del Laboratorio di Aerodinamica DAER del Politecnico di Milano, dove è stata condotta una serie di test in galleria del vento e con il gruppo di Gianluca Iaccarino della Stanford University, dove sono stati utilizzati algoritmi di deep learning per identificare modelli aerodinamici.
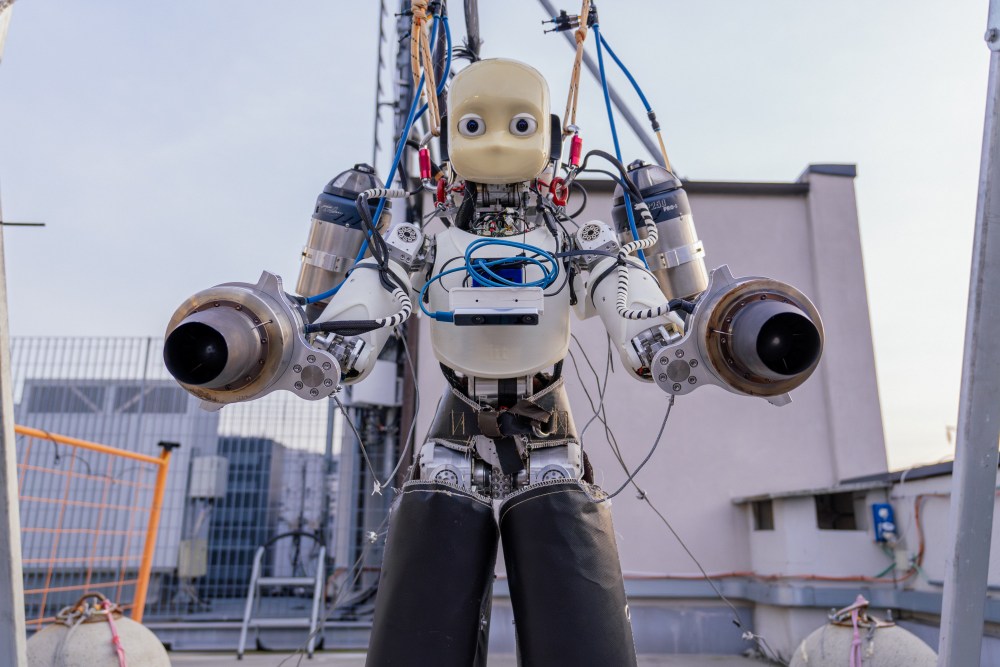
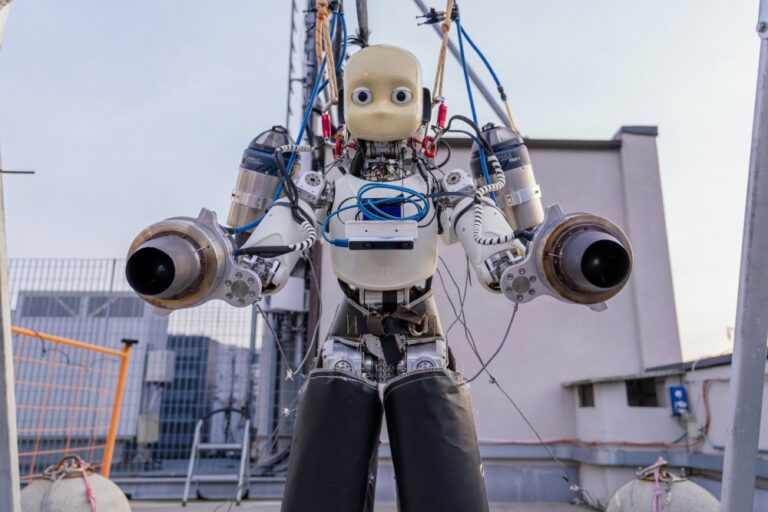
iRonCub3 è l’evoluzione tecnologica di prototipi precedenti e si basa su iCub3, sviluppato per essere teleoperato a distanza come un avatar, ultima generazione del robot umanoide iCub. iRonCub3 è munito di quattro motori a reazione, due montati sulle braccia e due su uno zaino posizionato sulla schiena. L’aggiunta dei motori ha richiesto delle modifiche ulteriori alla struttura fisica (hardware) del robot, tra cui un nuovo elemento in titanio che funge da colonna vertebrale e delle coperture resistenti al calore. iRonCub3 pesa circa 70 chili e le turbine possono generare una spinta massima superiore a 1000 newton. La nuova configurazione consente al robot di sollevarsi da terra e eseguire manovre di volo controllate anche in presenza di turbolenze del vento o in condizioni ambientali incerte. La temperatura dei gas di scarico può raggiungere gli 800 gradi.
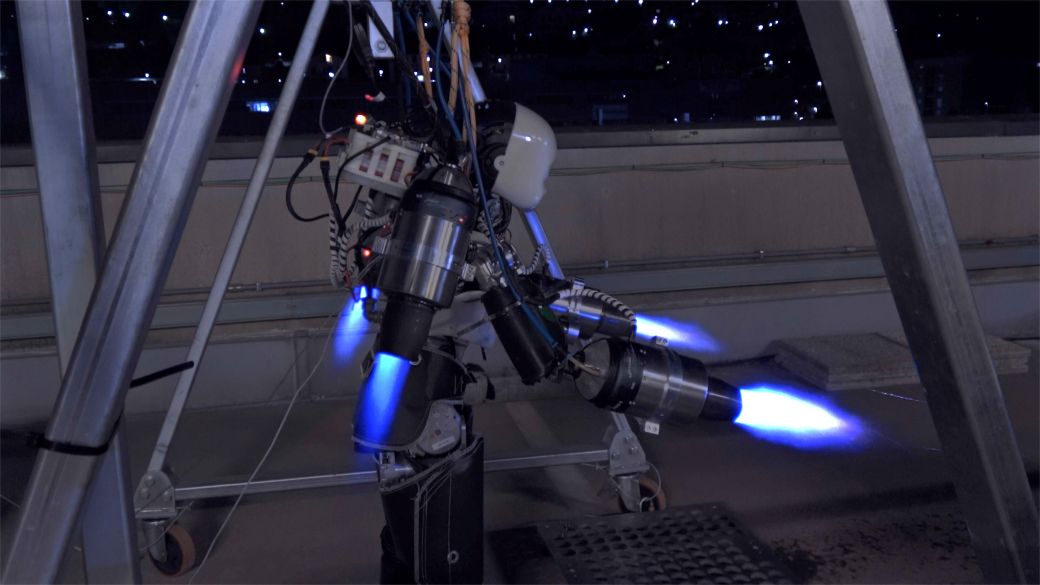
«Questa ricerca è radicalmente diversa dalla robotica umanoide tradizionale e ci ha costretto a fare un sostanziale salto in avanti rispetto allo stato dell’arte – spiega Daniele Pucci, ricercatore dell’Istituto Italiano di Tecnologia -. L’aerodinamica gioca un ruolo chiave, la temperatura di scarico delle turbine può raggiungere gli 800 gradi e il gas emesso si avvicina alla velocità del suono. L’intera piattaforma robotica, quindi, deve essere in grado di valutare la dinamica del volo in tempo reale, mentre il software di controllo gestisce da una parte il movimento lento dei giunti articolari; dall’altra le veloci turbine a reazione. Fare esperimenti su questi robot è affascinante così come pericoloso, e non lascia spazio all’improvvisazione».
Il team di ricerca si è concentrato sullo studio dell’equilibrio dinamico del robot mentre è in volo, reso particolarmente complesso dalla morfologia umanoide del robot. A differenza dei droni convenzionali, infatti, che hanno strutture simmetriche e compatte, iRonCub3 presenta una forma allungata, con il peso distribuito tra gli arti mobili e il busto, e con un centro di massa variabile. Ciò ha richiesto lo sviluppo di modelli teorici avanzati che descrivessero le diverse conformazioni possibili del corpo del robot, dove gli arti mobili rappresentano un elemento di complessità, e il relativo bilanciamento sotto l’influenza della propulsione dei razzi.
Gli studi sono stati condotti attraverso esperimenti in galleria del vento e simulazioni avanzate di Dinamica dei Fluidi Computazionale che hanno permesso lo sviluppo di un’intelligenza artificiale capace di stimare le forze aerodinamiche in tempo reale.
«I nostri modelli includono reti neurali addestrate su dati simulati e sperimentali e sono integrate nell’architettura software di controllo del robot per garantire un volo stabile», dichiara Antonello Paolino, primo autore del paper e dottorando in un programma congiunto tra Iit e Università di Napoli, che ha da poco concluso un semestre come visiting researcher alla Stanford University.
iRonCub3 è, di conseguenza, dotato di sistemi di controllo basati su intelligenza artificiale che gli consentono di volare gestendo flussi d’aria turbolenti ad alta velocità e temperature estreme.
Gli studi di aerodinamica hanno dimostrato che è possibile mantenere la postura e la stabilità del robot anche durante manovre non stazionarie, come l’accensione sequenziale dei motori o le variazioni nella geometria del corpo. Risultati che potranno essere trasferiti ad altri robot con morfologie non convenzionali, rappresentando un caso unico rispetto ai droni classici.
Il design finale di iRonCub3 è il risultato di un processo di co-design, sviluppato per integrare l’intelligenza artificiale con gli aspetti più fisici e aerodinamici della progettazione di robot volanti. Per esempio, il punto di posizionamento delle turbine è stato identificato affinché risultasse ottimale in termini di controllo e stabilità del volo. E la dissipazione del calore generato dai motori è stata gestita per garantire l’integrità strutturale del robot anche in condizioni operative estreme.
I primi test di volo di iRonCub3 sono stati condotti in una piccola area di volo allestita all’interno dell’Iit, dove il robot è stato in grado di sollevarsi dal suolo di circa 50 centimetri. Nei prossimi mesi gli esperimenti sul prototipo continueranno in un’area più ampia, grazie a una collaborazione con l’Aeroporto di Genova, che metterà a disposizione una zona dedicata che verrà allestita e equipaggiata dall’Istituto Italiano di Tecnologia nel rispetto di tutte le regole di sicurezza richieste.
I ricercatori Iit prevedono che nel futuro i robot umanoidi volanti come iRonCub3, che possono essere teleoperati una volta toccato terra, potranno trovare applicazione in molteplici scenari, dalle operazioni di ricerca e salvataggio in aree difficili da raggiungere, fino alle ispezioni di ambienti pericolosi.
Per approfondimento:
Nature Communications Engineering: “Learning Aerodynamics for the Control of Flying Humanoid Robots”.
Authors: Antonello Paolino, Gabriele Nava, Fabio Di Natale, Fabio Bergonti, Punith Reddy Vanteddu, Donato Grassi, Luca Riccobene, Alex Zanotti, Renato Tognaccini, Gianluca Iaccarino, Daniele Pucci.
arxiv: “iRonCub 3: The Jet-Powered Flying Humanoid Robot”.
-

- iRonCub3 e il team di ricercatori dell’Istituto Italiano di Tecnologia dell’unità Artificial and Mechanical Intelligence